Сформулируйте теорему о кинетической энергии. Referat
Теорема о кинетической энергии формулируется так. Сумма работы всех сил (консервативных и неконсервативных), приложенных к телу, равна приращению его кинетической энергии. С помощью этой теоремы можно обобщить закон сохранения механической энергии на случай незамкнутой (неизолированной) системы : приращению полной механической энергии системы равно работе сторонних сил над системой.
Траектория
Траекторией называется воображаемая линия, описываемая телом при движении. В зависимости от формы траектории движения бывают криволинейные и прямолинейные. Примеры криволинейного движения: движение тела, брошенного под углом к горизонту (траектория – парабола), движение материальной точки по окружности.
Трение
Возникает между двумя телами в плоскости соприкосновения их поверхностей и сопровождается диссипацией (рассеиванием) энергии. Механическая энергия системы, в которой есть трение, может только уменьшаться. Наука, изучающая трение, называется трибологией. Опытным путем установлено, что максимальная сила трения покоя и сила трения скольжения не зависит от площади соприкосновения тел и пропорциональна силе нормального давления, прижимающей поверхности друг к другу. Коэффициент пропорциональности при этом называется коэффициентом трения (покоя или скольжения).
Третий закон Ньютона
Третий закон Ньютона - физический закон, в соответствии с которым силы взаимодействия двух материальных точек равны по модулю, противоположны по направлению и действуют вдоль прямой, соединяющей эти точки. Как и прочие законы Ньютона, третий закон справедлив только для инерциальных систем отсчета . Краткая формулировка третьего закона: действие равно противодействию.
Третья космическая скорость
Третья космическая скорость - минимальная скорость , необходимая для того, чтобы космический аппарат, запущенный с Земли, преодолел притяжение Солнца и покинул Солнечную систему. Если бы Земля в момент запуска была неподвижна и не притягивала тело к себе, то третья космическая скорость была бы равна 42 км/с. С учетом скорости орбитального движения Земли (30 км/с) третья космическая скорость равна 42-30 = 12 км/с (при запуске в направлении орбитального движения) или 42+30 = 72 км/с (при запуске в противоположном направлении). Если учесть еще и силу притяжения к Земле, то для третьей космической скорости получим значения от 17 до 73 км/с.
Ускорение
Ускорение - векторная величина, характеризующая быстроту изменения скорости . При произвольном движении ускорение определяется как отношение приращения скорости к соответствующему промежутку времени. Если устремить этот промежуток времени к нулю, получим мгновенное ускорение. Значит, ускорение есть производная от скорости по времени. Если рассматривается конечный промежуток времени Δt, то ускорение называется средним. При криволинейном движении полное ускорение складывается из тангенциального (касательного) и нормального ускорения .
Угловая скорость
Угловая скорость - векторная величина, характеризующая вращательное движение твердого тела и направленная по оси вращения согласно правилу правого винта. Средняя угловая скорость численно равна отношению угла поворота к соответствующему промежутку времени. Взяв производную от угла поворота по времени, получим мгновенную угловую скорость. Единицей угловой скорости в СИ является рад/с.
Ускорение свободного падения
Ускорение свободно падающего тела - ускорение, с которым движется тело под действием силы тяготения. Ускорение свободного падения одинаково для всех тел, независимо от их массы . На Земле ускорение свободно падающего тела зависит от высоты над уровнем моря и от географической широты и направления к центру Земли. На широте 45 0 и на уровне моря ускорение свободно падающего тела g = 9.80665 м/с 2 . В учебных задачах обычно полагают g = 9,81 м/с 2 .
Физический закон
Физический закон - необходимая, существенная и устойчиво повторяющаяся связь между явлениями, процессами и состояниями тел. Познание физических законов составляет основную задачу физической науки.
50. Физический маятник
Физический маятник - абсолютно твердое тело , имеющее ось вращения. В поле тяготения физический маятник может совершать колебания около положения равновесия, при этом массу системы нельзя считать сосредоточенной в одной точке. Период колебаний физического маятника зависит от момента инерции тела и от расстояния от оси вращения до центра масс .
Энергия (от греч. energeia – деятельность)
Энергия - скалярная физическая величина, являющаяся общей мерой различных форм движения материи и мерой перехода движения материи из одних форм в другие. Основные виды энергии: механическая, внутренняя, электромагнитная, химическая, гравитационная, ядерная. Одни виды энергии могут превращаться в другие в строго определенных количествах (см. также Закон сохранения и превращения энергии ).
Термодинамика и молекулярная физика
Энергией называется скалярная физическая величина, являющаяся единой мерой различных форм движения материи и мерой перехода движения материи из одних форм в другие.
Для характеристики различных форм движения материи вводятся соответствующие виды энергии, например: механическая, внутренняя, энергия электростатических, внутриядерных взаимодействий и др.
Энергия подчиняется закону сохранения, который является одним из важнейших законов природы.
Механическая энергия Е характеризует движение и взаимодействие тел и является функцией скоростей и взаимного расположения тел. Она равна сумме кинетической и потенциальной энергий.
Кинетическая энергия
Рассмотрим случай, когда на тело массой m действует постоянная сила \(~\vec F\) (она может быть равнодействующей нескольких сил) и векторы силы \(~\vec F\) и перемещения \(~\vec s\) направлены вдоль одной прямой в одну сторону. В этом случае работу силы можно определить как A = F ∙s . Модуль силы по второму закону Ньютона равен F = m∙a , а модуль перемещения s при равноускоренном прямолинейном движении связан с модулями начальной υ 1 и конечной υ 2 скорости и ускорения а выражением \(~s = \frac{\upsilon^2_2 - \upsilon^2_1}{2a}\) .
Отсюда для работы получаем
\(~A = F \cdot s = m \cdot a \cdot \frac{\upsilon^2_2 - \upsilon^2_1}{2a} = \frac{m \cdot \upsilon^2_2}{2} - \frac{m \cdot \upsilon^2_1}{2}\) . (1)
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела .
Кинетическая энергия обозначается буквой E k .
\(~E_k = \frac{m \cdot \upsilon^2}{2}\) . (2)
Тогда равенство (1) можно записать в таком виде:
\(~A = E_{k2} - E_{k1}\) . (3)
Теорема о кинетической энергии
работа равнодействующей сил, приложенных к телу, равна изменению кинетической энергии тела.
Так как изменение кинетической энергии равно работе силы (3), кинетическая энергия тела выражается в тех же единицах, что и работа, т. е. в джоулях.
Если начальная скорость движения тела массой m равна нулю и тело увеличивает свою скорость до значения υ , то работа силы равна конечному значению кинетической энергии тела:
\(~A = E_{k2} - E_{k1}= \frac{m \cdot \upsilon^2}{2} - 0 = \frac{m \cdot \upsilon^2}{2}\) . (4)
Физический смысл кинетической энергии
кинетическая энергия тела, движущегося со скоростью υ, показывает, какую работу должна совершить сила, действующая на покоящееся тело, чтобы сообщить ему эту скорость.
Потенциальная энергия
Потенциальная энергия – это энергия взаимодействия тел.
Потенциальная энергия поднятого над Землей тела – это энергия взаимодействия тела и Земли гравитационными силами. Потенциальная энергия упруго деформированного тела – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальными называются силы , работа которых зависит только от начального и конечного положения движущейся материальной точки или тела и не зависит от формы траектории.
При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие.
Силы , работа которых зависит от формы траектории, называются непотенциальными . При перемещении материальной точки или тела по замкнутой траектории работа непотенциальной силы не равна нулю.
Потенциальная энергия взаимодействия тела с Землей
Найдем работу, совершаемую силой тяжести F т при перемещении тела массой m вертикально вниз с высоты h 1 над поверхностью Земли до высоты h 2 (рис. 1). Если разность h 1 – h 2 пренебрежимо мала по сравнению с расстоянием до центра Земли, то силу тяжести F т во время движения тела можно считать постоянной и равной mg .
Так как перемещение совпадает по направлению с вектором силы тяжести, работа силы тяжести равна
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
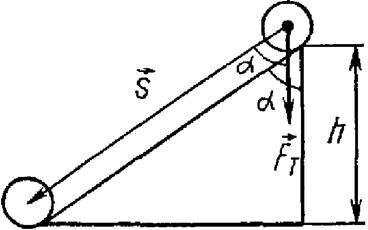
Рассмотрим теперь движение тела по наклонной плоскости. При перемещении тела вниз по наклонной плоскости (рис. 2) сила тяжести F т = m∙g совершает работу
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
где h – высота наклонной плоскости, s – модуль перемещения, равный длине наклонной плоскости.
Движение тела из точки В в точку С по любой траектории (рис. 3) можно мысленно представить состоящим из перемещений по участкам наклонных плоскостей с различными высотами h ’, h ’’ и т. д. Работа А силы тяжести на всем пути из В в С равна сумме работ на отдельных участках пути:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
где h 1 и h 2 – высоты от поверхности Земли, на которых расположены соответственно точки В и С .

Равенство (7) показывает, что работа силы тяжести не зависит от траектории движения тела и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях.
При движении вниз работа силы тяжести положительна, при движении вверх – отрицательна. Работа силы тяжести на замкнутой траектории равна нулю.
Равенство (7) можно представить в таком виде:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Физическую величину, равную произведению массы тела на модуль ускорения свободного падения и на высоту, на которую поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли.
Работа силы тяжести при перемещении тела массой m из точки, расположенной на высоте h 2 , в точку, расположенную на высоте h 1 от поверхности Земли, по любой траектории равна изменению потенциальной энергии взаимодействия тела и Земли, взятому с противоположным знаком.
\(~A = - (E_{p2} - E_{p1})\) . (9)
Потенциальная энергия обозначается буквой Е p .
Значение потенциальной энергии тела, поднятого над Землей, зависит от выбора нулевого уровня, т. е. высоты, на которой потенциальная энергия принимается равной нулю. Обычно принимают, что потенциальная энергия тела на поверхности Земли равна нулю.
При таком выборе нулевого уровня потенциальная энергия Е p тела, находящегося на высоте h над поверхностью Земли, равна произведению массы m тела на модуль ускорения свободного падения g и расстояние h его от поверхности Земли:
\(~E_p = m \cdot g \cdot h\) . (10)
Физический смысл потенциальной энергии взаимодействия тела с Землей
потенциальная энергия тела, на которое действует сила тяжести, равна работе, совершаемой силой тяжести при перемещении тела на нулевой уровень.
В отличие от кинетической энергии поступательного движения, которая может иметь лишь положительные значения, потенциальная энергия тела может быть как положительной, так и отрицательной. Тело массой m , находящееся на высоте h , где h < h 0 (h 0 – нулевая высота), обладает отрицательной потенциальной энергией:
\(~E_p = -m \cdot g \cdot h\) .
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М , находящихся на расстоянии r одна от другой, равна
\(~E_p = G \cdot \frac{M \cdot m}{r}\) . (11)
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Е p = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, M e – масса Земли, R e – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
\(~E_e = G \cdot \frac{M_e \cdot m \cdot h}{R_e \cdot (R_e +h)}\) . (12)
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « R e) равна
\(~E_p = m \cdot g \cdot h\) ,
где \(~g = G \cdot \frac{M_e}{R^2_e}\) – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x 1 до конечного значения x 2 (рис. 4, б, в).

Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т.к. сила упругости линейно зависит от x ) и умножить на модуль перемещения:
\(~A = F_{upr-cp} \cdot (x_1 - x_2)\) , (13)
где \(~F_{upr-cp} = k \cdot \frac{x_1 - x_2}{2}\) . Отсюда
\(~A = k \cdot \frac{x_1 - x_2}{2} \cdot (x_1 - x_2) = k \cdot \frac{x^2_1 - x^2_2}{2}\) или \(~A = -\left(\frac{k \cdot x^2_2}{2} - \frac{k \cdot x^2_1}{2} \right)\) . (14)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
\(~E_p = \frac{k \cdot x^2}{2}\) . (15)
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (16)
Если x 2 = 0 и x 1 = х , то, как видно из формул (14) и (15),
\(~E_p = A\) .
Физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Потенциальная энергия характеризует взаимодействующие тела, а кинетическая энергия – движущиеся тела. И потенциальная, и кинетическая энергия изменяются только в результате такого взаимодействия тел, при котором действующие на тела силы совершают работу, отличную от нуля. Рассмотрим вопрос об изменениях энергии при взаимодействиях тел, образующих замкнутую систему.
Замкнутая система – это система, на которую не действуют внешние силы или действие этих сил скомпенсировано . Если несколько тел взаимодействуют между собой только силами тяготения и силами упругости и никакие внешние силы на них не действуют, то при любых взаимодействиях тел работа сил упругости или сил тяготения равна изменению потенциальной энергии тел, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (17)
По теореме о кинетической энергии, работа тех же сил равна изменению кинетической энергии:
\(~A = E_{k2} - E_{k1}\) . (18)
Из сравнения равенств (17) и (18) видно, что изменение кинетической энергии тел в замкнутой системе равно по абсолютному значению изменению потенциальной энергии системы тел и противоположно ему по знаку:
\(~E_{k2} - E_{k1} = -(E_{p2} - E_{p1})\) или \(~E_{k1} + E_{p1} = E_{k2} + E_{p2}\) . (19)
Закон сохранения энергии в механических процессах :
сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и си-лами упругости, остается постоянной.
Сумма кинетической и потенциальной энергии тел называется полной механической энергией .
Приведем простейший опыт. Подбросим вверх стальной шарик. Сообщив начальную скорость υ нач, мы придадим ему кинетическую энергию, из-за чего он начнет подниматься вверх. Действие силы тяжести приводит к уменьшению скорости шарика, а значит, и его кинетической энергии. Но шарик поднимается выше и выше и приобретает все больше и больше потенциальной энергии (Е p = m∙g∙h ). Таким образом, кинетическая энергия не исчезает бесследно, а происходит ее превращение в потенциальную энергию.
В момент достижения верхней точки траектории (υ = 0) шарик полностью лишается кинетической энергии (Е k = 0), но при этом его потенциальная энергия становится максимальной. Дальше шарик меняет направление движения и с увеличивающейся скоростью движется вниз. Теперь происходит обратное превращение потенциальной энергии в кинетическую.
Закон сохранения энергии раскрывает физический смысл понятия работы :
работа сил тяготения и сил упругости, с одной стороны, равна увеличению кинетической энергии, а с другой стороны, – уменьшению потенциальной энергии тел. Следовательно, работа равна энергии, превратившейся из одного вида в другой.
Закон об изменении механической энергии
Если система взаимодействующих тел не замкнута, то ее механическая энергия не сохраняется. Изменение механической энергии такой системы равно работе внешних сил:
\(~A_{vn} = \Delta E = E - E_0\) . (20)
где Е и Е 0 – полные механические энергии системы в конечном и начальном состояниях соответственно.
Примером такой системы может служить система, в которой наряду с потенциальными силами действуют непотенциальные силы. К непотенциальным силам относятся силы трения. В большинстве случаев, когда угол между силой трения F r тела составляет π радиан, работа силы трения отрицательна и равна
\(~A_{tr} = -F_{tr} \cdot s_{12}\) ,
где s 12 – путь тела между точками 1 и 2.
Силы трения при движении системы уменьшают ее кинетическую энергию. В результате этого механическая энергия замкнутой неконсервативной системы всегда уменьшается, переходя в энергию немеханических форм движения.
Например, автомобиль, двигавшийся по горизонтальному участку дороги, после выключения двигателя проходит некоторый путь и под действием сил трения останавливается. Кинетическая энергия поступательного движения автомобиля стала равной нулю, а потенциальная энергия не увеличилась. Во время торможения автомобиля произошло нагревание тормозных колодок, шин автомобиля и асфальта. Следовательно, в результате действия сил трения кинетическая энергия автомобиля не исчезла, а превратилась во внутреннюю энергию теплового движения молекул.
Закон сохранения и превращения энергии
при любых физических взаимодействиях энергия превращается из одной формы в другую.
Иногда угол между силой трения F tr и элементарным перемещением Δr равен нулю и работа силы трения положительна:
\(~A_{tr} = F_{tr} \cdot s_{12}\) ,
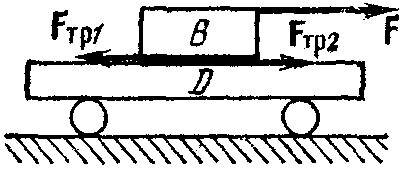
Пример 1 . Пусть, внешняя сила F действует на брусок В , который может скользить по тележке D (рис. 5). Если тележка перемещается вправо, то работа силы трения скольжения F tr2 , действующей на тележку со стороны бруска, положительна:
Пример 2 . При качении колеса его сила трения качения направлена вдоль движения, так как точка соприкосновения колеса с горизонтальной поверхностью двигается в направлении, противоположном направлению движения колеса, и работа силы трения положительна (рис. 6):

Литература
- Кабардин О.Ф. Физика: Справ. материалы: Учеб. пособие для учащихся. – М.: Просвещение, 1991. – 367 с.
- Кикоин И.К., Кикоин А.К. Физика: Учеб. для 9 кл. сред. шк. – М.: Про-свещение, 1992. – 191 с.
- Элементарный учебник физики: Учеб. пособие. В 3 т. / Под ред. Г.С. Ландсберга: т. 1. Механика. Теплота. Молекулярная физика. – М.: Физматлит, 2004. – 608 с.
- Яворский Б.М., Селезнев Ю.А. Справочное руководство по физике для поступающих в вузы и самообразования. – М.: Наука, 1983. – 383 с.
Кинетическая энергия материальной точки выражается половиной произведения массы этой точки на квадрат ее скорости.
Теорему о кинетической энергии материальной точки можно выразить в трех видах:
т. е. дифференциал кинетической энергии материальной точки равен элементарной работе силы, действующей на эту точку;
![]()
т. е. производная по времени от кинетической энергии материальной точки равна мощности силы, действующей на эту точку:

т. е. изменение кинетической энергии материальной точки на конечном пути равно работе силы, действующей на точку на том же пути.
Таблица 17. Классификация задач

Если на точку действует несколько сил, то в правые частя уравнений входит работа или мощность равнодействующей этих сил, которая равна сумме работ или мощностей всех составляющих сил.
В случае прямолинейного движения точки, направляя ось по прямой, по которой движется точка, имеем:
![]()

где , так как в этом случае равнодействующая всех приложенных к точке сил направлена по оси х.
Применяя теорему о кинетической энергии в случае несвободного движения материальной точки, нужно иметь в виду следующее: если на точку наложена совершенная стационарная связь (точка движется по абсолютно гладкой неподвижной поверхности или линии), то реакция связи в уравнения не входит, ибо эта реакция направлена по нормали к траектории точки и, следовательно, ее работа равна нулю. Если же приходится учитывать трение, то в уравнение кинетической энергии войдет работа или мощность силы трения.
Задачи, относящиеся к этому параграфу, можно разделить на два основных типа.
I. Задачи на применение теоремы о кинетической энергии при прямолинейном движении точки.
II. Задачи на применение теоремы о кинетической энергии при криволинейном движении точки.
Кроме того, задачи, относящиеся к типу I, можно разделить на три группы:
1) сила, действующая на точку (или равнодействующая нескольких сил), постоянна, т. е. , где X - проекция силы (или равнодействующей) на ось , направленную по прямолинейной траектории точки;
2) сила, действующая на точку (или равнодействующая), является функцией расстояния (абсциссы этой точки), т. е.
3) сила, действующая на точку (или равнодействующая), есть функция скорости этой точки, т. е.
Задачи, относящиеся к типу II, можно разделить на три группы:
1) сила, действующая на точку (или равнодействующая), постоянна и по модулю и по направлению (например, сила веса);
2) сила, действующая на точку (или равнодействующая), есть функция положения этой точки (функция координат точки);
3) движение точки при наличии сил сопротивления.
работа равнодействующей сил, приложенных к телу, равна изменению кинетической энергии тела.
Так как изменение кинетической энергии равно работе силы (3), кинетическая энергия тела выражается в тех же единицах, что и работа, т. е. в джоулях.
Если начальная скорость движения тела массой m равна нулю и тело увеличивает свою скорость до значения υ , то работа силы равна конечному значению кинетической энергии тела:
A =Ek 2−Ek 1=m ⋅υ 22−0=m ⋅υ 22 .
42) Потенциальные поля
Потенциальное поле
консервативное поле, векторное поле, циркуляция которого вдоль любой замкнутой траектории равна нулю. Если П. п. - силовое поле, то это означает равенство нулю работы сил поля вдоль замкнутой траектории. Для П. п. а (М ) существует такая однозначная функция u (М )(Потенциал поля), что а = gradu (см. Градиент). Если П. п. задано в односвязной области Ω, то потенциал этого поля может быть найден по формуле
в которой AM - любая гладкая кривая, соединяющая фиксированную точку А из Ω с точкой М, t - единичный вектор касательной кривой AM и / - длина дуги AM, отсчитываемая от точки А. Если а (М ) - П. п., то rot a = 0 (см. Вихрь векторного поля). Обратно, если rot а = 0 и поле задано в односвязной области и дифференцируемо, то а (М ) - П. п. Потенциальными являются, например, электростатическое поле, поле тяготения, поле скоростей при безвихревом движении.
43) Потенциальная энергия
Потенциальная энергия - скалярная физическая величина, характеризующая способность некого тела (или материальной точки) совершать работу за счет его нахождения в поле действия сил. Другое определение: потенциальная энергия - это функция координат, являющаяся слагаемым в лагранжианесистемы, и описывающая взаимодействие элементов системы. Термин «потенциальная энергия» был введен в XIX веке шотландским инженером и физиком Уильямом Ренкином.
Единицей измерения энергии в СИ является Джоуль.
Потенциальная энергия принимается равной нулю для некоторой конфигурации тел в пространстве, выбор которой определяется удобством дальнейших вычислений. Процесс выбора данной конфигурации называетсянормировкой потенциальной энергии .
Корректное определение потенциальной энергии может быть дано только в поле сил, работа которых зависит только от начального и конечного положения тела, но не от траектории его перемещения. Такие силы называются консервативными.
Также потенциальная энергия является характеристикой взаимодействия нескольких тел или тела и поля.
Любая физическая система стремится к состоянию с наименьшей потенциальной энергией.
Потенциальная энергия упругой деформации характеризует взаимодействие между собой частей тела.
Потенциальная энергия в поле тяготения Земли вблизи поверхности приближённо выражается формулой:
где E p - потенциальная энергия тела, m - масса тела, g - ускорение свободного падения, h - высота положения центра масс тела над произвольно выбранным нулевым уровнем.
44) Связь силы и потенциальной энергии
Каждой точке потенциального поля соответствует, с одной стороны, некоторое значение вектора силы , действующей на тело, и, с другой стороны, некоторое значение потенциальной энергии . Следовательно, между силой и потенциальной энергией должна существовать определенная связь.
Для установления этой связи вычислим элементарную работу , совершаемую силами поля при малом перемещении тела, происходящем вдоль произвольно выбранного направления в пространстве, которое обозначим буквой . Эта работа равна
где - проекция силы на направление .
Поскольку в данном случае работа совершается за счет запаса потенциальной энергии , она равна убыли потенциальной энергии на отрезке оси :
Из двух последних выражений получаем
Последнее выражение дает среднее значение на отрезке . Чтобы
получить значение в точке нужно произвести предельный переход:
в математике вектор ,
где а - скалярная функция х, у, z, называется градиентом этого скаляра обозначается символом . Следовательно сила равна градиенту потенциальной энергии, взятого с обратным знаком
45) Закон сохранения механической энергии
Статьи по теме